Содержание
Hyundai Motor Group приступает к созданию модели лунохода для исследования Луны
Hyundai Motor Group 21 апреля 2023 14:42
- Hyundai Motor Group совместно с крупными корейскими исследовательскими институтами в аэрокосмической отрасли строит экспериментальную модель лунохода.
- Автономный привод специально разработан для исследования поверхности Луны и оснащен различными передовыми технологиями с целью создания универсально применимой мобильной платформы для работы с различными полезными нагрузками.
- Лунная мобильная платформа включает в себя солнечную зарядку, автономное вождение, управление температурным режимом и радиационную защиту, а также может нести различное оборудование на марсоходе с максимальным весом 70 кг.
- Группа ожидает завершения первоначальной модели разработки уже во второй половине 2024 года и намерена создать марсоход, способный запускаться в 2027 году.
- Развитие вездехода отражает концепцию Метамобильности Группы по расширению охвата людей с помощью мобильных решений, выходящих за рамки наземной, морской и воздушной мобильности.


Hyundai Motor Group (далее Группа) объявила о том, что совместно с аэрокосмическими партнерами приступила к созданию начальной модели лунохода для исследования Луны.
В июле 2022 года Группа подписала совместное многостороннее исследовательское соглашение с шестью корейскими научно-исследовательскими институтами в аэрокосмическом секторе для запуска и поддержки консультативного органа по разработке мобильного решения для исследования лунной поверхности.
В состав консультативного органа входят Корейский институт астрономии и космических наук (KASI), Научно-исследовательский институт электроники и телекоммуникаций (ETRI), Корейский институт гражданского строительства и строительных технологий (KICT), Корейский институт аэрокосмических исследований (KARI), Корейский научно-исследовательский институт атомной энергии (KAERI). ) и Корейский институт автомобильных технологий (KATECH).
После обсуждений с различными заинтересованными сторонами Группа определила направление первоначальной модели развития мобильности для исследования Луны. Группа рассчитывает завершить первоначальный испытательный блок уже во второй половине 2024 года и планирует создать модель, которая сможет быть запущена в 2027 году.
Группа рассчитывает завершить первоначальный испытательный блок уже во второй половине 2024 года и планирует создать модель, которая сможет быть запущена в 2027 году.
«Hyundai Motor Group неизменно заявляла, что ее цель состоит в том, чтобы способствовать расширению охвата людей и масштабов их мобильности, — сказал Йонг Ва Ким, исполнительный вице-президент и руководитель Центра планирования и координации исследований и разработок Hyundai Motor и Kia. «Создание модели развития мобильности для исследования Луны не только отражает эту цель, но и демонстрирует наше стремление к достижению ощутимых результатов перед лицом серьезных проблем. С развитием марсохода мы выходим за пределы наземной, морской и воздушной мобильности, чтобы перейти к космической мобильности».
Для вездехода Группа использует передовые технологии робототехники и автономного вождения Hyundai Motor Company и Kia Corporation (камера, LiDAR), систему вождения (двигатель, колеса, подвеска), зарядные устройства (солнечная панель, аккумулятор), а также робота Hyundai Rotem. технология производства как часть многоцелевой мобильной платформы.
технология производства как часть многоцелевой мобильной платформы.
Компоненты группы займут нижнюю часть марсохода, а верхняя часть будет состоять из научных полезных нагрузок для исследования лунной поверхности. Ровер будет иметь функцию терморегулирования и радиационную защиту, чтобы противостоять экстремальным условиям лунной поверхности.
После того, как нижняя часть марсохода будет разработана, консультативный орган ожидает, что она будет функционировать как мобильная платформа, поддерживающая верхнюю часть, которая будет содержать множество передовых технологий для рытья, раскопок и исследования человеком лунной поверхности в поисках ресурсов. В конечном счете, цель состоит в том, чтобы предоставить универсально применимую мобильную платформу для обработки различных полезных нагрузок.
После разработки, тестирования и доработки планируется посадить марсоход вблизи южного полюса Луны для выполнения различных научных миссий. Автомобиль с автономным управлением на солнечных батареях будет весить около 70 кг.
Автомобиль с автономным управлением на солнечных батареях будет весить около 70 кг.
Прежде чем марсоход можно будет отправить на Луну, группа проведет эксплуатационные испытания модели разработки в среде, похожей на поверхность Луны, в рамках подготовки к лунной миссии и внесет уточнения на основе результатов испытаний.
Пресс-релиз подготовлен на основании материала, предоставленного организацией. Информационное агентство AK&M не несет ответственности за содержание пресс-релиза, правовые и иные последствия его опубликования.
СМИ: связь с японским модулем Hakuto-R прервалась в десяти метрах от Луны
https://ria.ru/20230426/lunokhod-1867751044.html
СМИ: связь с японским модулем Hakuto-R прервалась в десяти метрах от Луны
СМИ: связь с японским модулем Hakuto-R прервалась в десяти метрах от Луны — РИА Новости, 26.04.2023
СМИ: связь с японским модулем Hakuto-R прервалась в десяти метрах от Луны
Связь с японским модулем Hakuto-R, внутри которого находится первый арабский луноход «Рашид», прервалась во время преодоления им последних десяти метров до. .. РИА Новости, 26.04.2023
.. РИА Новости, 26.04.2023
2023-04-26T00:18
2023-04-26T00:18
2023-04-26T10:14
луна
земля
дубай
/html/head/meta[@name=’og:title’]/@content
/html/head/meta[@name=’og:description’]/@content
https://cdnn21.img.ria.ru/images/07e7/04/1a/1867789738_0:320:3072:2048_1920x0_80_0_0_4facbb83662772889d7bb00aa56342b7.jpg
ДОХА, 26 апр — РИА Новости. Связь с японским модулем Hakuto-R, внутри которого находится первый арабский луноход «Рашид», прервалась во время преодоления им последних десяти метров до поверхности Луны, сообщила эмиратская газета Khaleej Times. По информации издания, связь прервалась, когда посадочный модуль опустился до последних 33 футов (10 метров), совершая посадку со скоростью около 16 миль в час (25 километров в час). Ранее центр управления создавшей модуль частной компании ispace не смог подтвердить, удалось ли посадить на Луне модуль Hakuto-R, отметив, что инженеры выясняют его статус. Как сообщил после этого в Twitter Космический центр имени Мухаммеда бен Рашида в Дубае, инженеры компании продолжают расследование и дадут информацию после его завершения. Его специалисты разъяснили, что посадка планетохода на Луну является очень сложной задачей по нескольким причинам. При этом прогноз по возможности посадки японского аппарата был неплохим, хоть и не превышал 50%, обычно успеху таких миссий не дают больше 30%. Сила тяжести Луны составляет примерно одну шестую силы тяжести Земли, что затрудняет посадку и управление движением космического корабля. Кроме того, отсутствие атмосферы на Луне затрудняет замедление космического аппарата во время спуска. Поверхность Луны покрыта слоем мелкой пыли, называемой реголитом, глубина которого в некоторых местах может достигать нескольких метров. Из-за этой пыли может быть трудно ориентироваться, и она может представлять опасность для двигателей и шасси космического корабля. Существует также проблема связи с космическим кораблем во время процесса посадки. Сигналу требуется около 1,28 секунды, чтобы добраться от Луны до Земли, что означает задержку связи. Эта задержка может затруднить корректировку траектории спускаемого аппарата в режиме реального времени в процессе посадки.
Его специалисты разъяснили, что посадка планетохода на Луну является очень сложной задачей по нескольким причинам. При этом прогноз по возможности посадки японского аппарата был неплохим, хоть и не превышал 50%, обычно успеху таких миссий не дают больше 30%. Сила тяжести Луны составляет примерно одну шестую силы тяжести Земли, что затрудняет посадку и управление движением космического корабля. Кроме того, отсутствие атмосферы на Луне затрудняет замедление космического аппарата во время спуска. Поверхность Луны покрыта слоем мелкой пыли, называемой реголитом, глубина которого в некоторых местах может достигать нескольких метров. Из-за этой пыли может быть трудно ориентироваться, и она может представлять опасность для двигателей и шасси космического корабля. Существует также проблема связи с космическим кораблем во время процесса посадки. Сигналу требуется около 1,28 секунды, чтобы добраться от Луны до Земли, что означает задержку связи. Эта задержка может затруднить корректировку траектории спускаемого аппарата в режиме реального времени в процессе посадки. Только три страны, которые были пионерами в космической отрасли, — США, Советский Союз и Китай, смогли посадить свои аппараты на Луне. Изготовленный эмиратскими специалистами мини-луноход «Рашид», вес которого составляет десять килограммов, был запущен в космос с космодрома на мысе Канаверал в декабре прошлого года на аппарате Hakuto-R частной компании ispace. Его прилунение на спускаемом аппарате ожидалось на ранее не исследованной северо-восточной части видимой стороны Луны в районе кратера Атлас. Четырехколесный луноход оснащен двумя камерами, микроскопом, тепловизором и солнечными батареями. Планировалось, что в течение десяти дней после посадки он будет снимать поверхность Луны и проводить исследования.
Только три страны, которые были пионерами в космической отрасли, — США, Советский Союз и Китай, смогли посадить свои аппараты на Луне. Изготовленный эмиратскими специалистами мини-луноход «Рашид», вес которого составляет десять килограммов, был запущен в космос с космодрома на мысе Канаверал в декабре прошлого года на аппарате Hakuto-R частной компании ispace. Его прилунение на спускаемом аппарате ожидалось на ранее не исследованной северо-восточной части видимой стороны Луны в районе кратера Атлас. Четырехколесный луноход оснащен двумя камерами, микроскопом, тепловизором и солнечными батареями. Планировалось, что в течение десяти дней после посадки он будет снимать поверхность Луны и проводить исследования.
https://ria.ru/20230425/luna-1867744514.html
https://ria.ru/20230424/grunt-1867291113.html
луна
земля
дубай
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og. xn--p1ai/awards/
xn--p1ai/awards/
2023
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
Новости
ru-RU
https://ria.ru/docs/about/copyright.html
https://xn--c1acbl2abdlkab1og.xn--p1ai/
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
1920
1080
true
1920
1440
true
https://cdnn21.img.ria.ru/images/07e7/04/1a/1867789738_0:0:2732:2048_1920x0_80_0_0_b4c9ca582547a8326e3e907e435ab109.jpg
1920
1920
true
РИА Новости
1
5
4.7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
РИА Новости
1
5
4. 7
7
96
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
луна, земля, дубай
Луна, Земля, Дубай
ДОХА, 26 апр — РИА Новости. Связь с японским модулем Hakuto-R, внутри которого находится первый арабский луноход «Рашид», прервалась во время преодоления им последних десяти метров до поверхности Луны, сообщила эмиратская газета Khaleej Times.
По информации издания, связь прервалась, когда посадочный модуль опустился до последних 33 футов (10 метров), совершая посадку со скоростью около 16 миль в час (25 километров в час).
ЦУП не смог подтвердить успешную посадку на Луне японского модуля Hakuto-R
25 апреля, 22:34
Ранее центр управления создавшей модуль частной компании ispace не смог подтвердить, удалось ли посадить на Луне модуль Hakuto-R, отметив, что инженеры выясняют его статус.
Как сообщил после этого в Twitter Космический центр имени Мухаммеда бен Рашида в Дубае, инженеры компании продолжают расследование и дадут информацию после его завершения. Его специалисты разъяснили, что посадка планетохода на Луну является очень сложной задачей по нескольким причинам. При этом прогноз по возможности посадки японского аппарата был неплохим, хоть и не превышал 50%, обычно успеху таких миссий не дают больше 30%.
Его специалисты разъяснили, что посадка планетохода на Луну является очень сложной задачей по нескольким причинам. При этом прогноз по возможности посадки японского аппарата был неплохим, хоть и не превышал 50%, обычно успеху таких миссий не дают больше 30%.
Сила тяжести Луны составляет примерно одну шестую силы тяжести Земли, что затрудняет посадку и управление движением космического корабля. Кроме того, отсутствие атмосферы на Луне затрудняет замедление космического аппарата во время спуска. Поверхность Луны покрыта слоем мелкой пыли, называемой реголитом, глубина которого в некоторых местах может достигать нескольких метров. Из-за этой пыли может быть трудно ориентироваться, и она может представлять опасность для двигателей и шасси космического корабля.
Существует также проблема связи с космическим кораблем во время процесса посадки. Сигналу требуется около 1,28 секунды, чтобы добраться от Луны до Земли, что означает задержку связи. Эта задержка может затруднить корректировку траектории спускаемого аппарата в режиме реального времени в процессе посадки.
Только три страны, которые были пионерами в космической отрасли, — США, Советский Союз и Китай, смогли посадить свои аппараты на Луне.
Изготовленный эмиратскими специалистами мини-луноход «Рашид», вес которого составляет десять килограммов, был запущен в космос с космодрома на мысе Канаверал в декабре прошлого года на аппарате Hakuto-R частной компании ispace.
Его прилунение на спускаемом аппарате ожидалось на ранее не исследованной северо-восточной части видимой стороны Луны в районе кратера Атлас. Четырехколесный луноход оснащен двумя камерами, микроскопом, тепловизором и солнечными батареями. Планировалось, что в течение десяти дней после посадки он будет снимать поверхность Луны и проводить исследования.
Россия передала Китаю образец лунного грунта
24 апреля, 11:31
Луноход «Аполлон»
Луноход «Аполлон»
Lunar Roving Vehicle (LRV) был электрическим транспортным средством, предназначенным для работы в
низкогравитационный вакуум Луны и возможность пересечь лунную поверхность,
позволяя астронавтам Аполлона увеличить дальность полета в открытом космосе.
деятельность. Три LRV были отправлены на Луну, один на Аполлон-15 астронавтами.
Дэвид Скотт и Джим Ирвин, один на «Аполлоне-16» Джона Янга и Чарльза Дьюка и
один на Аполлоне-17 Джина Сернана и Харрисона Шмитта. Каждый вездеход использовался на трех
походы, по одному в день в течение трехдневного курса каждой миссии. На Аполлоне 15
LRV проехал в общей сложности 27,8 км за 3 часа 2 минуты вождения.
самый длинный одиночный поход составил 12,5 км, а максимальная дальность от LM — 5,0 км.
На «Аполлоне-16» машина преодолела 26,7 км за 3 часа 26 минут движения.
самый длинный переход составил 11,6 км, а LRV прошел расстояние 4,5 км от LM.
На «Аполлоне-17» марсоход прошел 35,9км за 4 часа 26 минут общего времени в пути.
наибольшая дальность хода составила 20,1 км, а наибольшая дальность от ЛМ — 7,6 км.
Лунный вездеход имел массу 210 кг и был рассчитан на перевозку
полезная нагрузка дополнительных 490 кг на поверхности Луны. Рама была 3,1 метра
длинной с колесной базой 2,3 метра. Максимальная высота составила 1,14 метра.
Максимальная высота составила 1,14 метра.
Каркас был изготовлен из сварных трубных узлов из алюминиевого сплава 2219 и состоял из
шасси из 3 частей, шарнирное в центре, чтобы его можно было сложить и повесить
в отсеке квадроцикла 1 лунного модуля. У него было два складывающихся сиденья, сделанных из
трубчатый алюминий с нейлоновой лямкой и алюминиевыми панелями пола. Подлокотник был
устанавливались между сиденьями, и каждое сиденье имело регулируемые подножки и застежку-липучку.
ремень безопасности. Большая сетчатая параболическая антенна была установлена на мачте в центре передней части корабля.
Rover. Подвеска состояла из двойных горизонтальных поперечных рычагов с верхним
и нижние торсионы и демпферный блок между шасси и верхним поперечным рычагом.
При полной загрузке LRV имел дорожный просвет 36 см.
Колеса состояли из алюминиевой ступицы диаметром 81,8 см и шириной 23 см.
шина из оцинкованных тканых стальных прядей диаметром 0,083 см, прикрепленных к
обод и диски из формованного алюминия.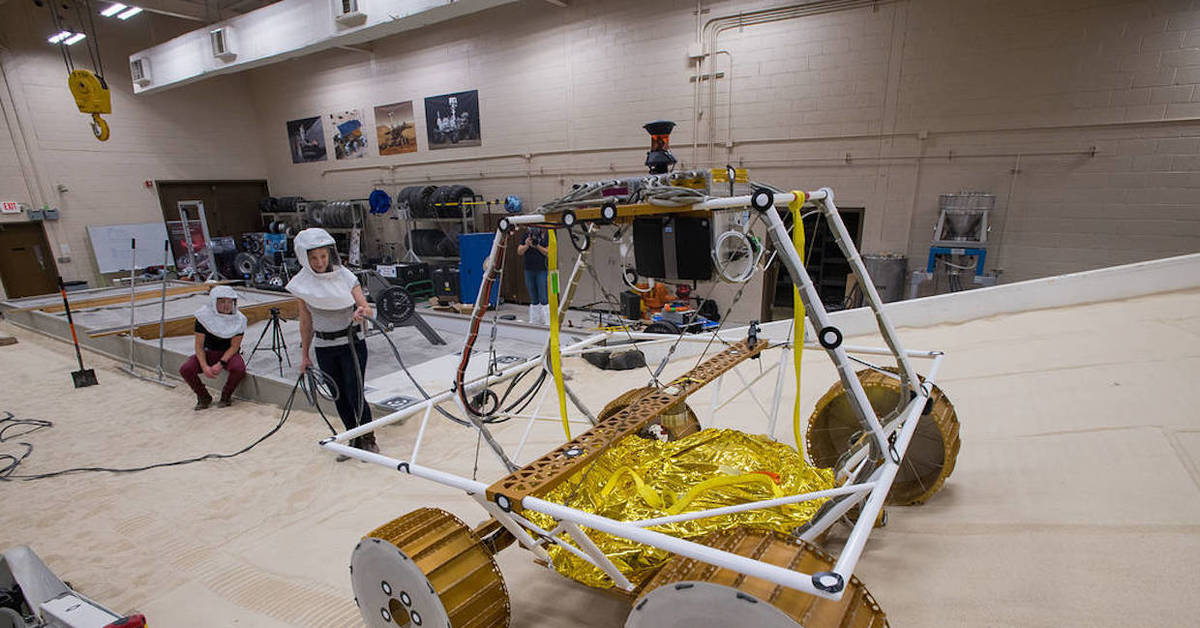 Титановые шевроны покрыли 50% контакта
Титановые шевроны покрыли 50% контакта
площадь, обеспечивающая тягу. Внутри шины находилась рама отбойника диаметром 64,8 см.
для защиты ступицы. Пылезащитные щитки были установлены над колесами. Каждый
колесо имело собственный электропривод, двигатель постоянного тока мощностью 0,25 л.с.
10 000 об / мин, прикрепленный к колесу через гармонический привод 80: 1 и механический
тормозной узел. Маневренность обеспечивалась за счет использования передней и
задние рулевые моторы. Каждый серийный двигатель рулевого управления с обмоткой постоянного тока был способен
0,1 л.с. Оба набора колес будут вращаться в противоположных направлениях, давая
радиус поворота руля 3,1 метра или может быть отсоединен, поэтому будет использоваться только один комплект
используется для рулевого управления. Питание обеспечивалось двумя 36-вольтовыми серебряно-цинковыми калиевыми
гидроксидные неперезаряжаемые батареи емкостью 121 ампер-час. Это были
используется для питания двигателей привода и рулевого управления, а также для подключения к электросети на 36 вольт.
установлен на передней панели LRV для питания релейного блока связи или телевизора
камера. Пассивные терморегуляторы поддерживали батареи в оптимальном
диапазон температур.
Т-образный ручной контроллер, расположенный между двумя сиденьями, управлял четырьмя
приводные двигатели, два рулевых двигателя и тормоза. Перемещение палки вперед
приводил LRV в движение вперед, влево и вправо, поворачивал автомобиль влево или вправо, тянул
назад активировал тормоза. Активация переключателя на ручке перед
оттягивание назад приведет к включению LRV задним ходом. Потянув за ручку до конца
назад активировал стояночный тормоз. Блоки управления и индикации располагались
перед ручкой и давал информацию о скорости, курсе, тангаже и
уровень мощности и температуры. Навигация основывалась на непрерывной записи
направление и расстояние с помощью гироскопа направления и одометра и
ввод этих данных в компьютер, который будет отслеживать общее
направление и расстояние до LM. Было также устройство Sun-shadow, которое
Было также устройство Sun-shadow, которое
мог указать курс вручную, основываясь на направлении Солнца, используя тот факт, что
что Солнце очень медленно двигалось по небу. На изображении слева показана диаграмма
компоновки модуля управления и индикации устройство Sun-shadow находится на
вверху по центру между указателями курса и скорости.
Развертывание LRV с LM quad 1 астронавтами было достигнуто с
система шкивов и тормозных барабанов с использованием канатов и матерчатых лент. Ровер был
в сложенном виде и хранится в quad 1 нижней стороной шасси наружу.
Один астронавт поднимался по аварийной лестнице на LM и освобождал вездеход.
который затем будет медленно наклоняться вторым космонавтом на земле
с помощью катушек и лент. Когда марсоход спустили с бухты
большая часть развертывания была автоматической. Задние колеса разложены и заблокированы
место, и когда они касались земли, передняя часть вездехода могла быть развернута,
колеса развернуты, и вся рама спущена на поверхность шкивами.
Компоненты вездехода зафиксировались на месте при открытии. Кабели, штифты и штативы
затем будут сняты, а сиденья и подножки подняты. После включения всех
электроника автомобиля была готова отступить от LM. Изображение справа
показывает более раннюю версию запланированного развертывания, которая не совсем соответствует
финальная последовательность, обратите внимание, например, что ровер смотрит в сторону от LM
после развертывания.
Первоначальный контракт на вознаграждение с поощрительным вознаграждением с Boeing (с Delco в качестве основного
субподрядчик) был за 19 миллионов долларов и предусматривал поставку первого легкового автомобиля
1 апреля 1971 года, но перерасход средств привел к окончательной стоимости в 38 миллионов долларов. Четыре лунных
были построены марсоходы, по одному для Аполлонов 15, 16, qnd 17 и один, который использовался для
запасные части после отмены дальнейших миссий Аполлона. Были и другие
Построены модели LRV: статическая модель для помощи в проектировании человеческого фактора,
инженерная модель для проектирования и интеграции подсистем, две гравитационные модели в масштабе 1/6
для проверки механизма развертывания, тренажер 1-гравит.
инструктаж астронавтов по эксплуатации марсохода и позволяет им
попрактикуйтесь в вождении, массовая модель, чтобы проверить влияние вездехода на LM
структура, баланс и управляемость, установка для вибрационных испытаний для изучения LRV
долговечность и устойчивость к нагрузкам при запуске, а также квалификационное испытательное устройство для
изучить интеграцию всех подсистем LRV. LRV был разработан всего в 17
месяцев и все же выполнял все свои функции на Луне без каких-либо серьезных аномалий.
Харрисон Шмитт из «Аполлона-17» сказал: «…лунный вездеход оказался
Мы ожидали, что это будет надежный, безопасный и гибкий луноход для исследования Луны.
Без него основные научные открытия Аполлона 15, 16 и 17 не были бы реализованы.
были возможны; и наше нынешнее понимание лунной эволюции не будет
были возможны».
Ссылки
- Бейкер, Дэвид, Лунный вездеход: отчет о конструкции, Космический полет,
13, 234-240, июль 1971 г. - Боинг ЛРВ Систем Инжиниринг,
Справочник по эксплуатации лунохода, док. ЛС006-002-2Н,
Хантсвилл, Алабама, 19 апреля 1971 г. - Беркхальтер, Бетти и Майкл Шарп, Лунный вездеход: историческое происхождение,
Разработка и внедрение, История ракетной техники и воздухоплавания,
Серия истории AAS, 22 , 227-261, 1998.
 ЛС006-002-2Н,
ЛС006-002-2Н,Домашняя страница Аполлона
Миссия Аполлона-15 на поверхности Луны
Миссия Аполлона-16 на поверхности Луны
Миссия «Аполлон-17» на поверхности Луны
Справочник по эксплуатации лунохода
Лунный вездеход — Музей авиации и космонавтики
Вызов человека-марсохода — НАСА
Автор/куратор:
д-р Дэвид Р. Уильямс, [email protected]
NSSDCA, почтовый индекс 690.1
Центр космических полетов имени Годдарда НАСА
Гринбелт, Мэриленд 20771
+1-301-286-1258
Официальный представитель НАСА: Дэйв Уильямс, [email protected]
Последнее обновление: 19 мая 2016 г. , DRW
, DRW
Metal Earth Space-Apollo Lunar Rover
Дом
Классические модели
Космос
